
Bonjour à tous !
Qui n’a pas entendu parler de Curiosity, le rover américain qui parcourt les paysages sublimes de Mars depuis 2012?
Je vous propose, aujourd’hui, de découvrir les hypothétiques petits-enfants de Curiosity ! Allons explorer, ensemble, les concepts de rovers les plus originaux ! Il s’agit d’idées, de de prototypes : peut-être (voire sans doute) ne verront-ils jamais le jour.
Mais l’objectif, ici, n’est pas de prédire le futur mais de découvrir des idées originales, inspirantes, surprenantes, même ! Voire, qui sait, d’être informé avant tout le monde de l’avenir de l’exploration spatiale? Moi, par exemple, je parie que les rovers « bondisseurs » vont se multiplier.
AREE (Automaton Rover Extreme Environments)
AREE combine le steampunk avec l’exploration spatiale pour permettre des mesures scientifiques inatteignables avec notre technologie moderne.

Vous vous souvenez peut-être de mon article sur la La Colonisation de Vénus? Si c’est le cas, vous vous souvenez des conditions cauchemardesques qui règnent à la surface de Venus : pression atmosphérique écrasante, températures infernales, atmosphère acide… tout ceci explique le fait que nous en sachions si peu sur la surface de Venus.
Les sondes Venera ont, dans les années 1960 et 1970, essayé de s’aventurer sur la surface de Venus : les dernières sondes à s’être aventurées à la surface sont les sondes Venera 13 et Venera 14, en mars 1982. Elles survécurent respectivement 127 et 57 minutes aux conditions au sol (elles avaient été conçues pour résister à la pression et à la température, pour mémoire).
Un des gros points faibles pour un rover à la surface de Venus, ce n’est pas de concevoir une carlingue résistante à la chaleur : on trouve, sans trop de difficultés, des métaux et des alliages résistant à une température supérieure à 400 degrés Celsius. Le gros problème, c’est de réussir à avoir un système électrique fonctionnel à ces températures-là -surtout en ce qui concerne la partie « informatique » : toutes les personnes ayant un PC savent que la chaleur est le pire ennemi des processeurs-.
Comment résoudre ce problème? Dépenser des milliards dans un système de refroidissement qui ne tiendra qu’un jour, deux peut-être? Ce n’est pas la voie privilégiée par AREE (Automation Rover for Extreme Environments). L’idée est très simple : vous prenez un rover, vous virez toute la partie électrique relative au déplacement et à la commande à distance du rover et vous remplacez ça par un système purement mécanique, très robuste. Vous aboutissez à un rover que vous ne pouvez pas vraiment contrôler, qui se déplacera tout seul en fonction du sens du vent, mais qui pourra consacrer son énergie à préserver la partie purement électronique. Cette partie électronique concernera en partie les mesures scientifiques (bien que l’idée soit aussi de remplacer pas mal de senseurs par des éléments mécaniques, que ce soit pour la barométrie, l’activité sismique, le sens et la force du vent, des calculateurs analogiques etc…), mais surtout la partie « communication avec la Terre« .
Ce rover me paraît s’inspirer d’une exposition d’art contemporain. Feydrautha a éclairé ma lanterne : cela pourrait rappeler l’artiste hollandais Theo Jansen, créateur des Strandbeest : http://www.strandbeest.com/index.php.
L’idée, proposée en 2015, a commencé à être étudiée sérieusement l’année dernière. Affaire à suivre !
VAMP/LEAF
Voilà une idée signée Northrop Grumman, des industriels qui sont connus, notamment, pour avoir conçu et produit le (très) célèbre B2, l’avion furtif le plus badass du monde.
L’idée, c’est de concevoir un véhicule aérien nommé VAMP, pour Venus Atmospheric Maneuverable Platform. Ce serait la première application de la famille de véhicules LEAF (Lifting Entry Atmospheric Flight). Il s’agira d’un véhicule d’entrée atmosphérique hypersonique, capable de faire la transition vers un mode aérien semi-flottant fonctionnant à l’énergie solaire.
Un lanceur le transporterait jusqu’à Venus, pour se placer en orbite. C’est là qu’on libère VAMP, qui fait son entrée dans l’atmosphère ; si la rentrée se passe bien, l’engin passe en phase de vol, où il se baladera dans les couches moyennes et supérieures de la très dense et très haute atmosphère vénusienne.
Durée de la mission? Un an. C’est énorme comparé aux missions Venera.
Niveau esthétique, l’engin ressemblerait au B2 Spirit et au X-47B.
BALLET (BALloon Locomotion for Extreme Terrain)

L’idée, ici, est simple : une sorte de mini-dirigeable, doté de six pieds. Chacun de ces pieds est, en réalité, un instrument scientifique. Le rover se déplace en marchant, un pied à la fois, restant extrêmement stable.
Un tel rover pourrait se déplacer sur des terrains extrêmement tourmentés, là où des chenils ou des roues ne peuvent fonctionner, permettant d’étendre les possibilités en matière d’exploration au sol.
C’est une idée récente, soumise à la sagacité de la NASA le 30 mars 2018.
SPARROW (Steam Propelled Autonomous Retrieval Robot for Ocean Worlds)
L’idée de rovers qui bondissent ici ou là fait son petit bonhomme de chemin. J’évoquais déjà une telle idée sur mon article relatif au Google Lunar X Prize. L’idée est reprise et adaptée à l’exploration de la surface des mondes océans, c’est-à-dire des lunes et planètes naines dont la surface n’est qu’une immense banquise.
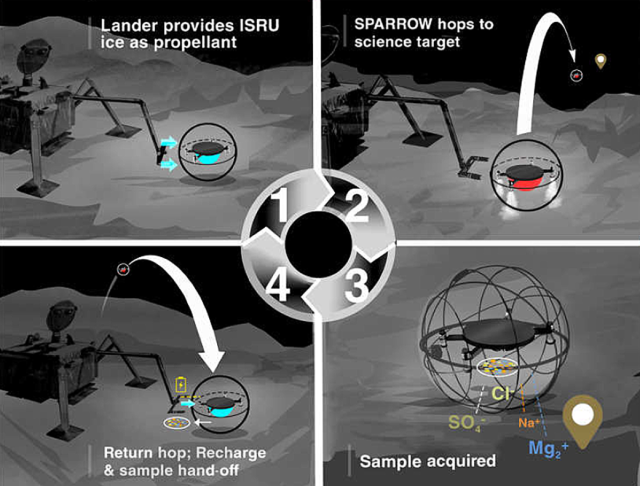
L’idée est simple : vous avez un atterrisseur ; il lâche le petit rover, qui va utiliser les ressources locales (-la glace, quoi-) comme carburant. Grâce à cela, il va pouvoir bondir de lieux en lieux, récupérer des échantillons, et les ramener à l’atterrisseur (qui s’occupera des analyses scientifiques et de la communication des données à la Terre). Cela permet de couvrir plus de terrains, et d’explorer des endroits très accidentés impropres à la présence de rovers à roues ou chenils.
Shapeshifters
Ce concept peut être résumé de la façon suivante : il s’agit d’un robot amphibie volant modulaire. Cela signifie qu’il s’agit d’un robot qui peut se diviser en unités robotiques plus petites, qui se recombinent pour changer de modalités de déplacement : au sol, volant, sous l’eau…
Chaque petite unité robotique serait de conception simple, composée d’une structure légère et de quelques hélices. Shapeshifter aurait la forme d’une boule au sol, pourrait se réunir pour créer un drone volant, ou prendre la forme d’une torpille pour se déplacer sous l’eau.
Peut-être sera-t-il, un jour, prévu qu’ils puissent se transformer en voiture? e que s’appelerio Quézac Autobot. Le rêve est permis.

Marsbee
L’idée de base est très simple : créer des drones à ailes battantes, comme des abeilles, qui iraient butiner les données scientifiques autour du rover-ruche. Tout simplement.
Les mini-robots seraient de la taille d’un bourdon, avec des ailes de la taille d’une cigale. C’est pousser encore plus loin l’idée de l’essaim de drones.

Cela permettrait d’avoir une charge utile moindre, une plus grande couverture de terrain et une plus grande adaptabilité.
Si je comprends bien, il s’agirait d’un projet impliquant la coopération d’une université américaine -l’Université de l’Alabama- avec une équipe japonaise.
Triton Hopper
Triton Hopper est un projet de rover qui vise Triton (pas trop surpris, j’espère?), la plus grosse lune de Neptune. On en sait fort peu sur Neptune et Uranus et leurs lunes : après tout, c’est loin, très loin.
Pour ma part, j’avoue avoir une certaine fascination pour Neptune, mais je m’éloigne du sujet.

J’enfonce une autre porte ouverte : le Triton Hopper va bondir de point en point sur Triton. L’idée fait son chemin : quitte à dépenser des milliards pour envoyer une sonde robotique, autant s’assurer qu’elle puisse couvrir un maximum de terrain. Logique.
Un des sujets d’étude concernera les cryovolcans : Triton semble géologiquement active et semble avoir des cryovolcans, ou volcans de glace (qui crachent de l’eau liquide, ou encore de l’azote liquide alors que le reste est solide ! Oui, il fait froid).
Comment bondir? Facile : il suffira d’exploiter localement les éléments volatils, comme l’azote. Pour cela, il faut les récolter, les réchauffer (pour les rendre à nouveau gazeux) et voilà le travail.
Bon, en réalité le nombre de défis techniques est important, et si la mission est un jour financée, elle n’atterrira sur Triton qu’à l’horizon 2040 ! Après tout, Neptune c’est loin : 4,3 milliards de kilomètres au point le plus rapproché de la Terre. Pour rappel, Mars est à 55 millions de kilomètres de la Terre, et Jupiter qu’à 588 millions de kilomètres aux points les plus rapprochés de leurs orbites respectives.
Pluto Hop, Skip and Jump
Vous avez compris le concept : on se retrouve avec la même idée que précédemment, mais pour Pluton.
Par contre, je relève la promesse de réussir à rendre un tel projet réalisable dans un délai décent : 10 à 15 ans. On attend de voir venir !
Des windbots pour les géantes gazeuses
L’idée est de réussir à placer des sondes robotiques dans l’atmosphère des géantes gazeuses afin de faire des relevés in-situ, ces sondes réussissant à tirer leur énergie des ressources locales : les vents titanesques, les champs magnétiques monstrueux, et autres joyeusetés du genre.
Pour les nerds dans mon lectorat, je tiens tout de même à leur signaler qu’ils peuvent se référer à ce document qui explore plus avant le concept.

AREE me rappelle les œuvres de l’artiste/mécanicien hollandais Theo Jansen. Les Strandbeest : http://www.strandbeest.com/index.php
J’aimeAimé par 1 personne
Ah ! Merci ! J’étais sûr d’avoir déjà vu ce genre de concepts, sans retrouver l’oeuvre d’art en question !
J’aimeJ’aime
Pour citer un de mes philosophes préférés, Mr Spock : « Fascinant ! ».
J’aimeAimé par 1 personne